UTRA ART
One of the amazing teams at the UofT Robotics Association is ART, or the autonomous rover team. As you may imagine, the autonomous rover team is tasked with creating a rover that can move autonomously through an obstacle course. UTRA ART’s current robot is named Espresso, and competes in the Intelligent Ground Vehicle Competition (IGVC). Here is some of the work I have done with the UTRA ART team!
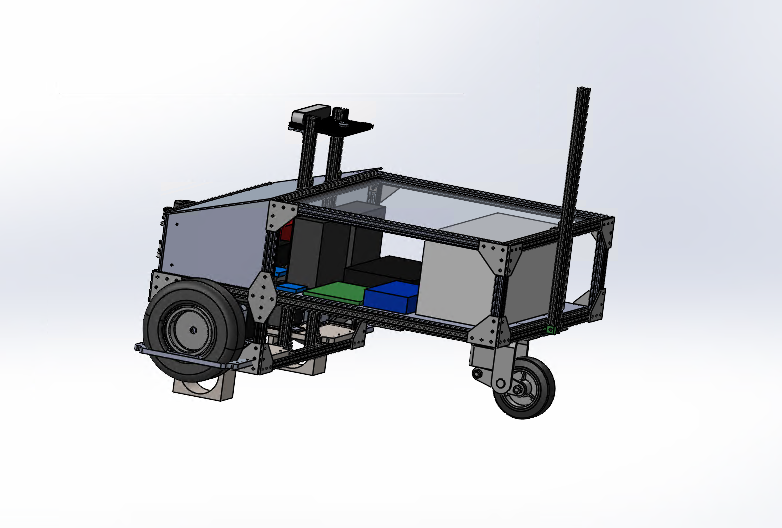
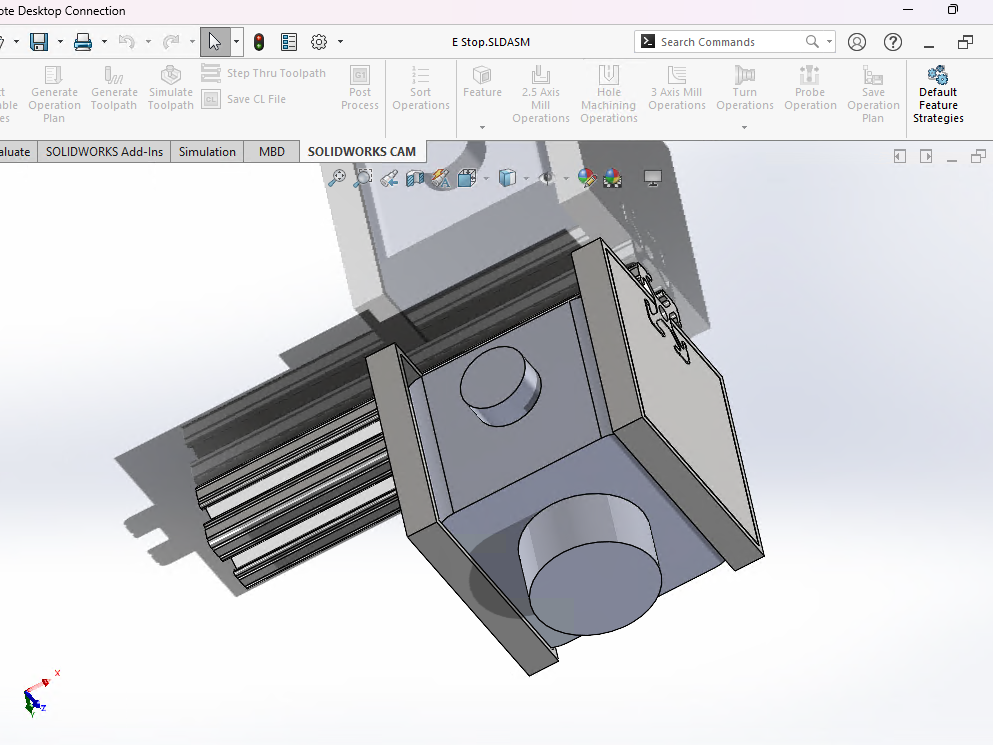
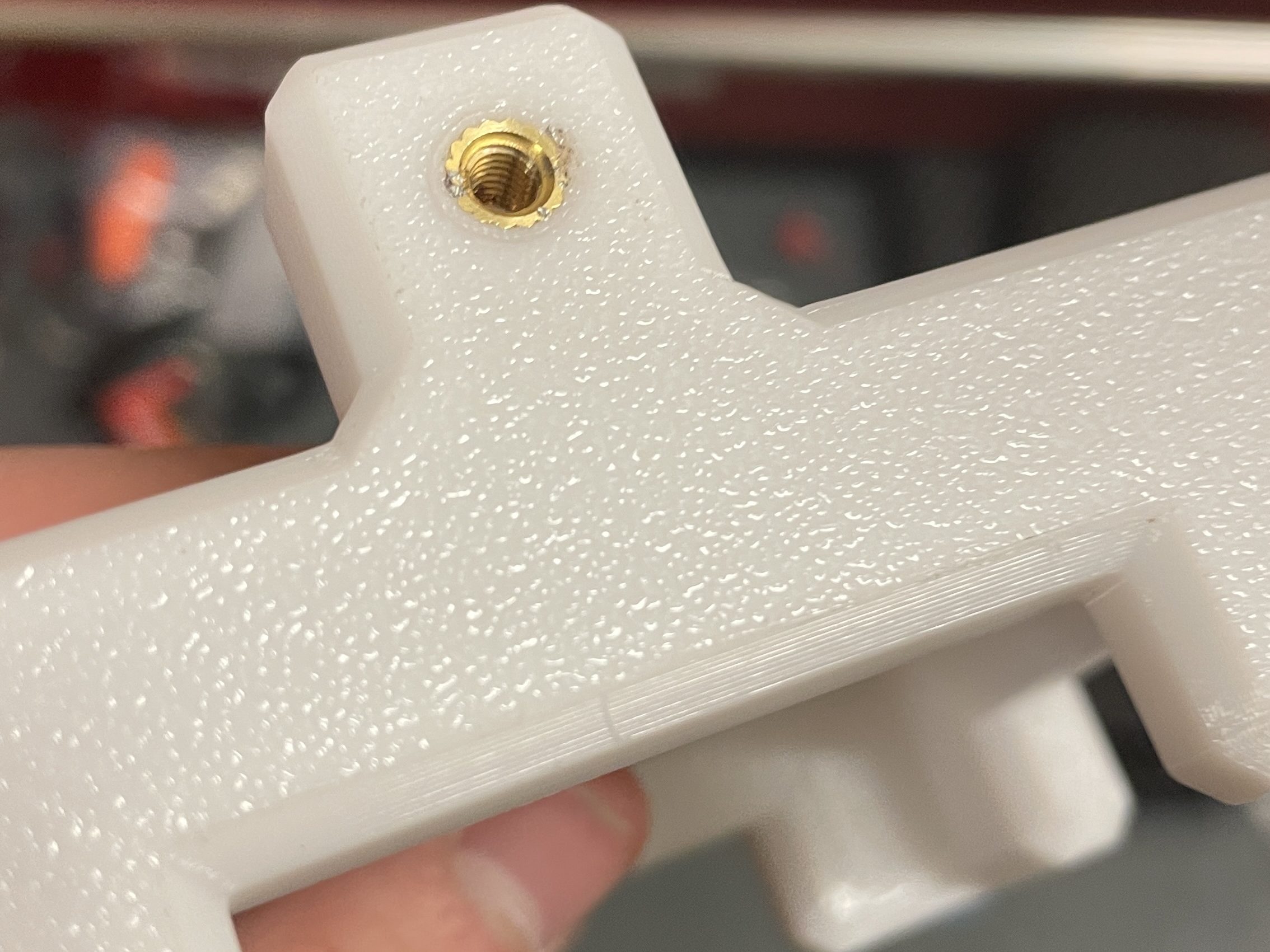
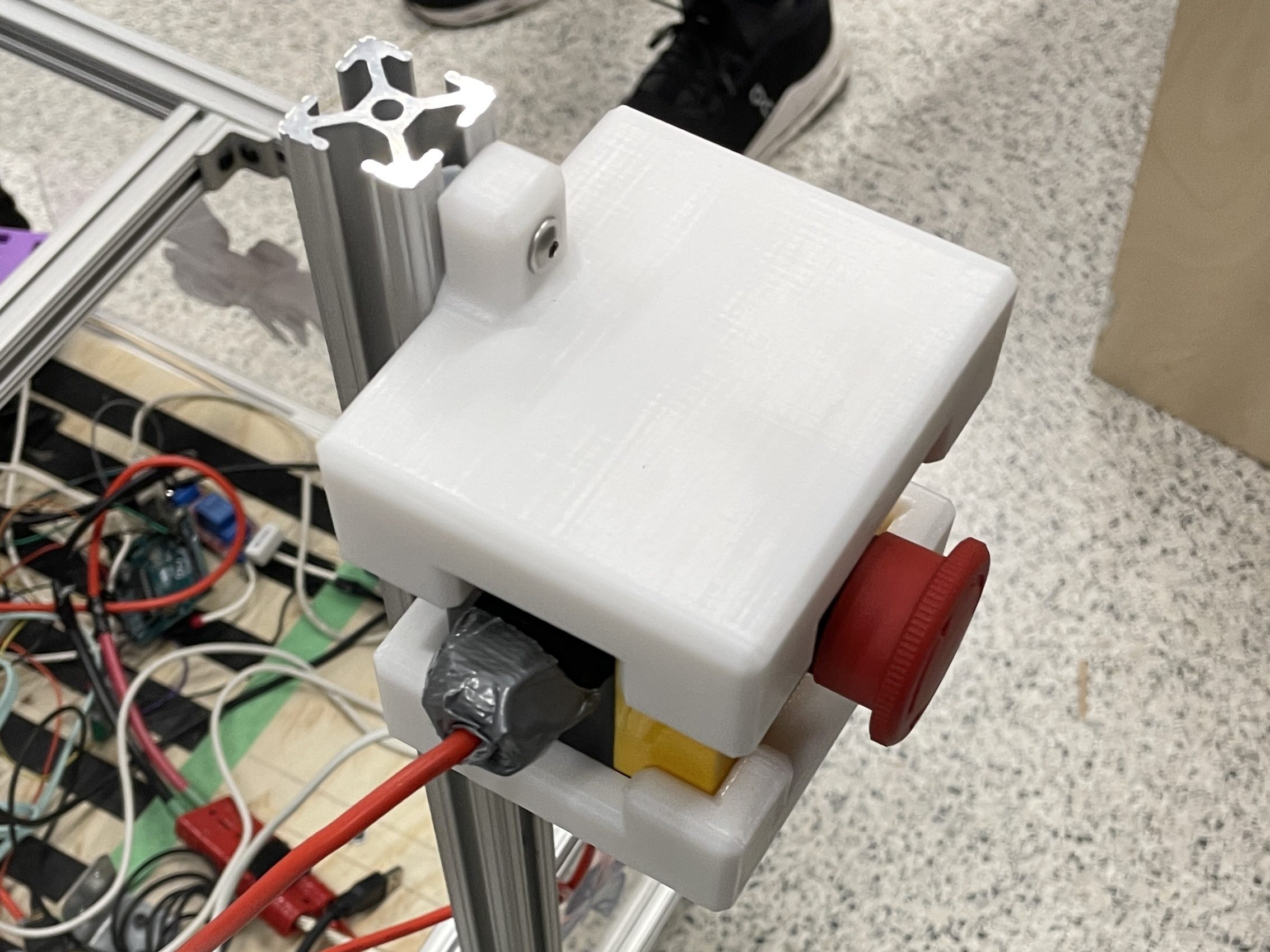
Emergency Stop Mounting System
The first task I decided to take on was improving the mounting for the emergency stop system. When I joined ART, the emergency stop was literally held on by just one screw and a boat-load of double-sided tape. I wanted to make something that was a little bit nicer, and a lot easier to disassemble.
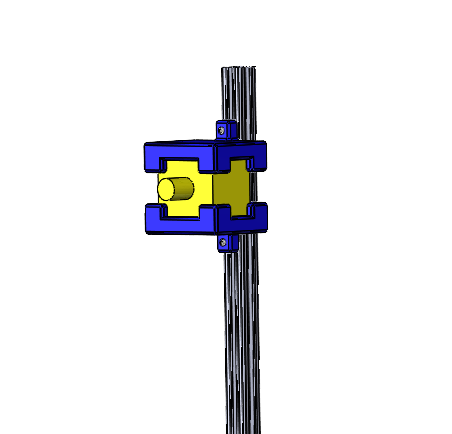
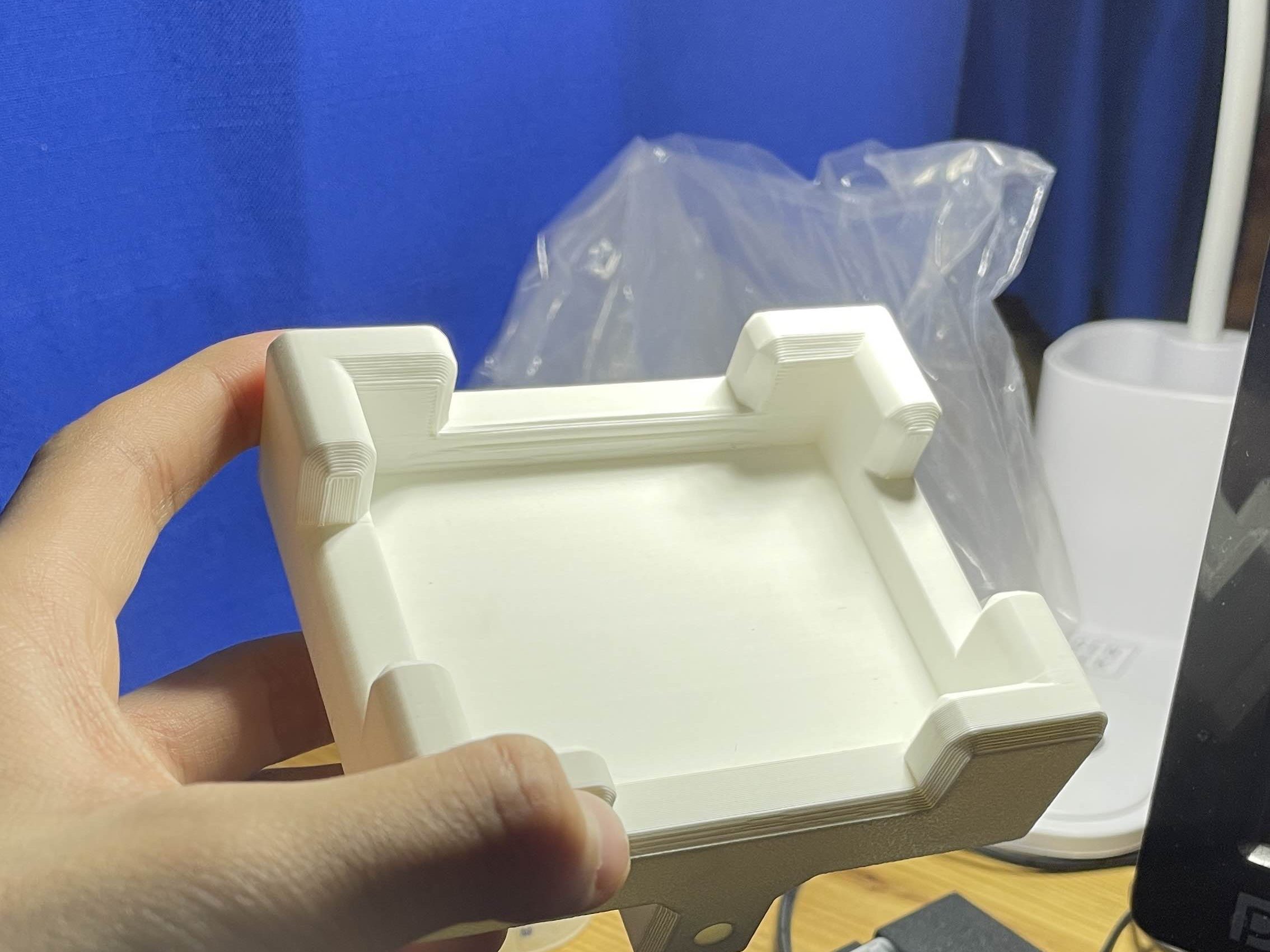
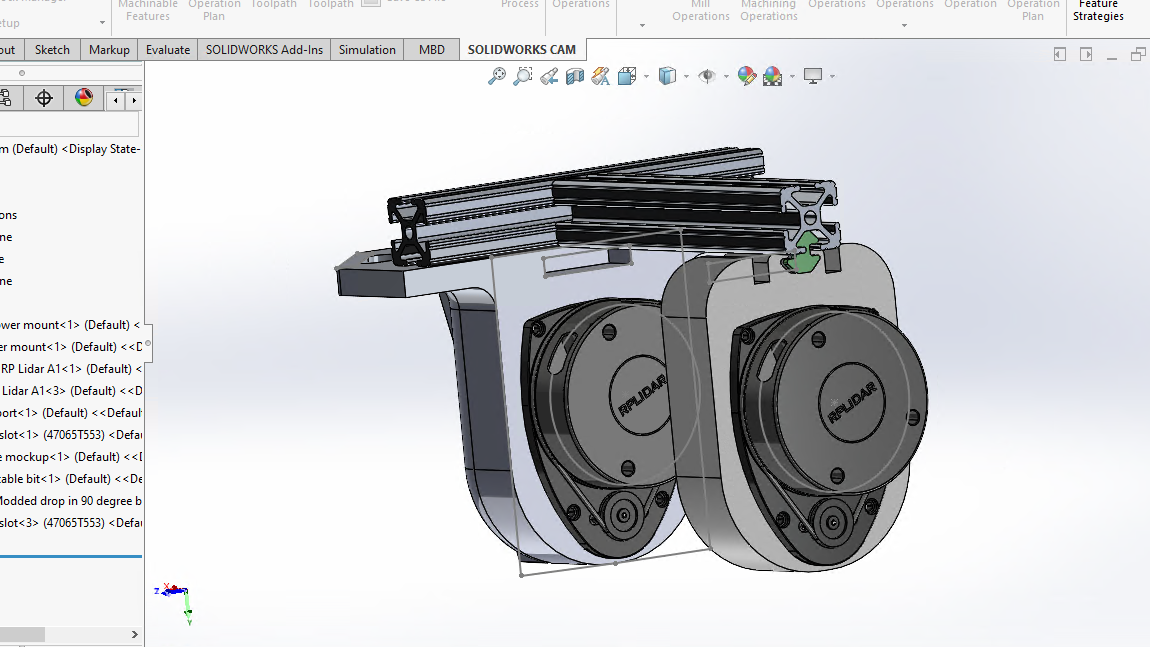
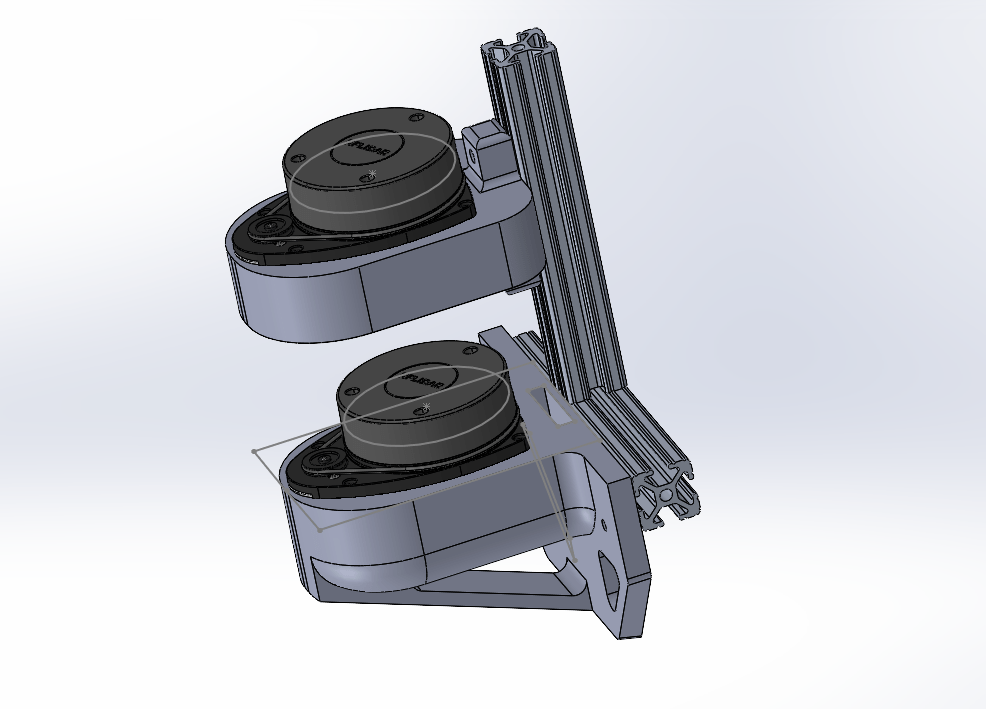
LiDAR Mounting System
The next task I decided to take on was improving the LiDAR mounting system. When the LiDAR was turned on and was rotating, this caused the whole mount to vibrate rapidly in an oscillating manner. Therefore, the team wanted a stiffer mounting system to reduce oscillations and therefore gain better readings from the LiDAR.
Coming soon!
